02. Active Sensors
Active vs. Passive Sensors
Before we jump into active sensors right away, lets take a look at both active and passive sensors. This way we can get an idea of each and carry that information with us as we learn about both!
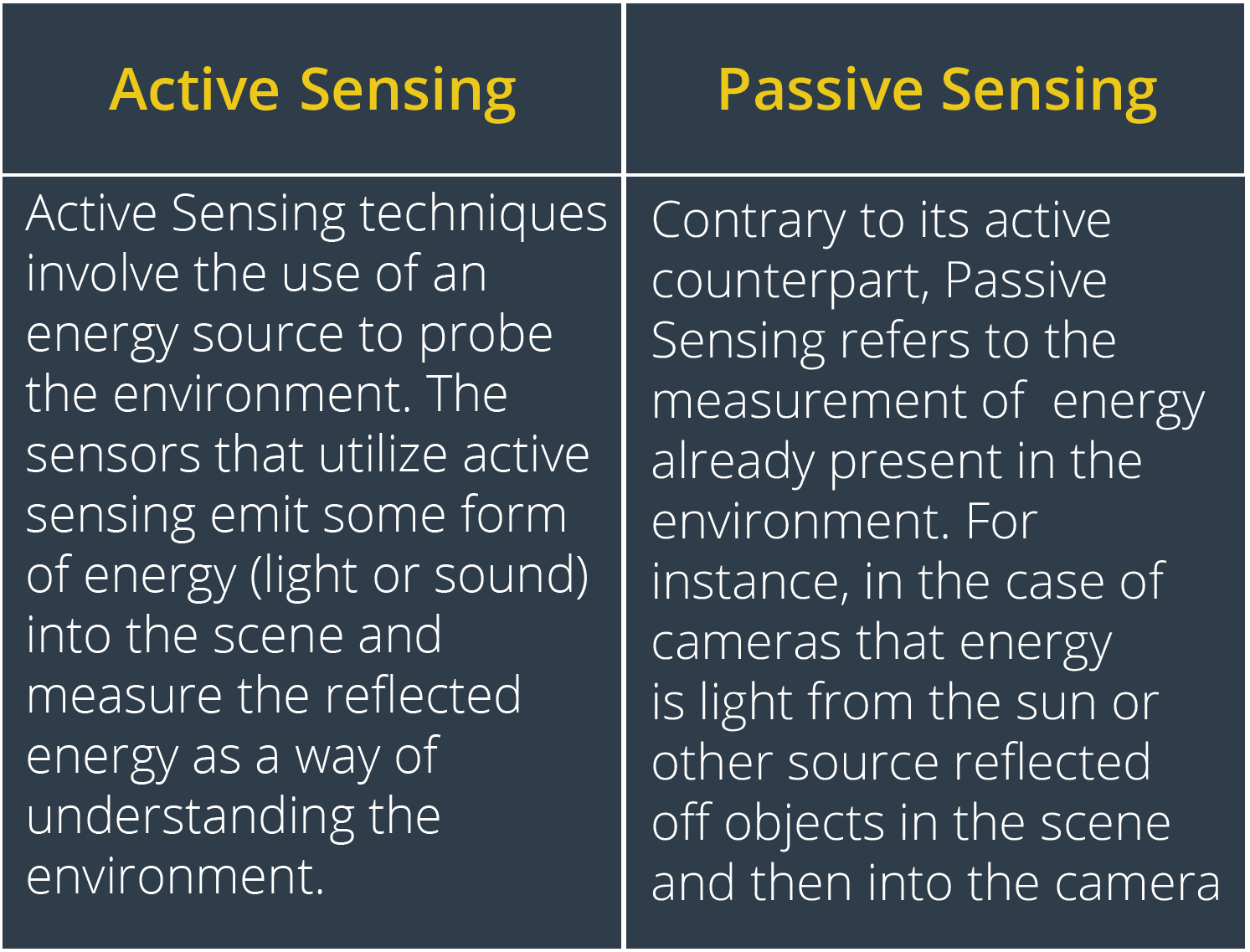
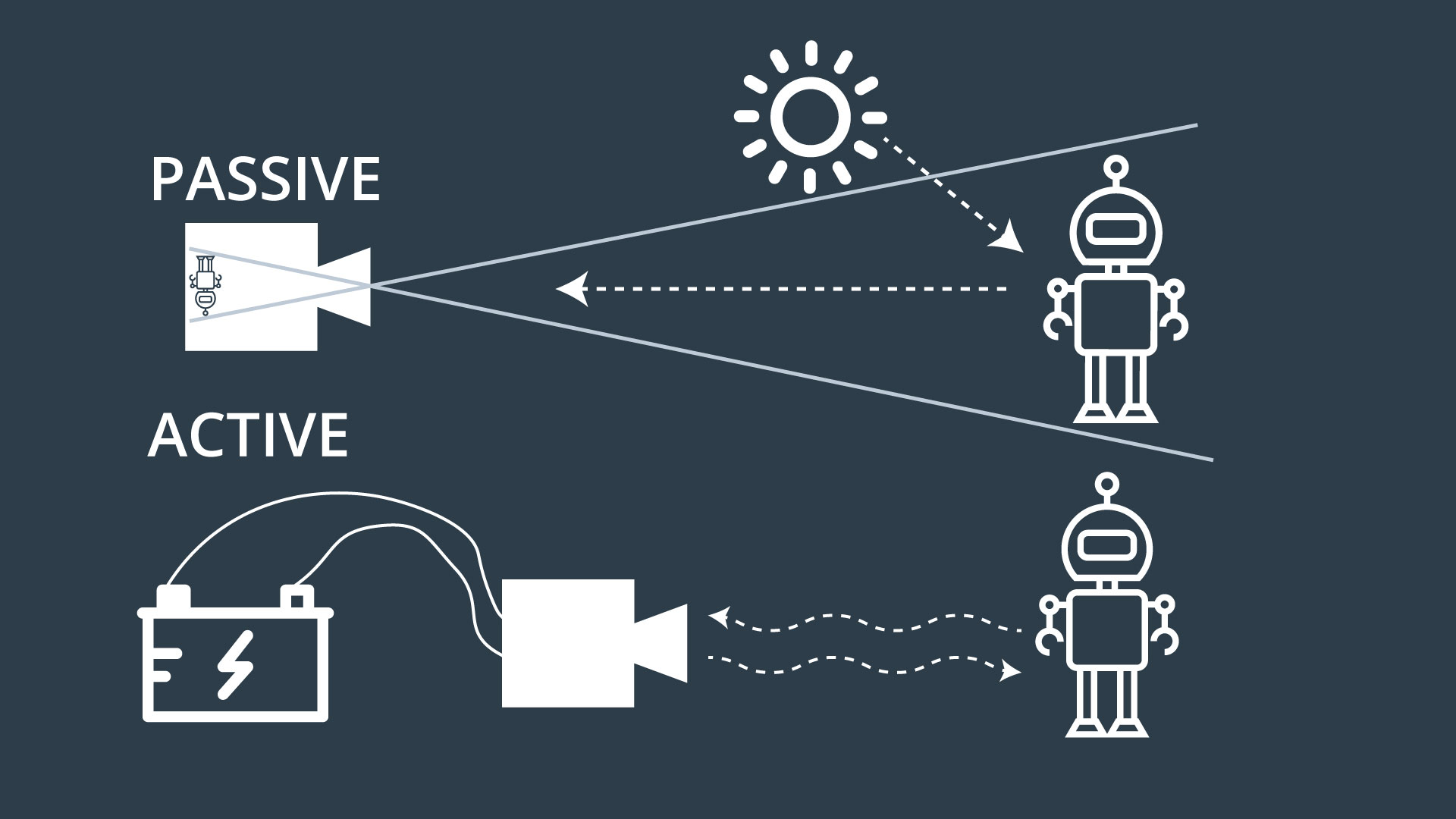
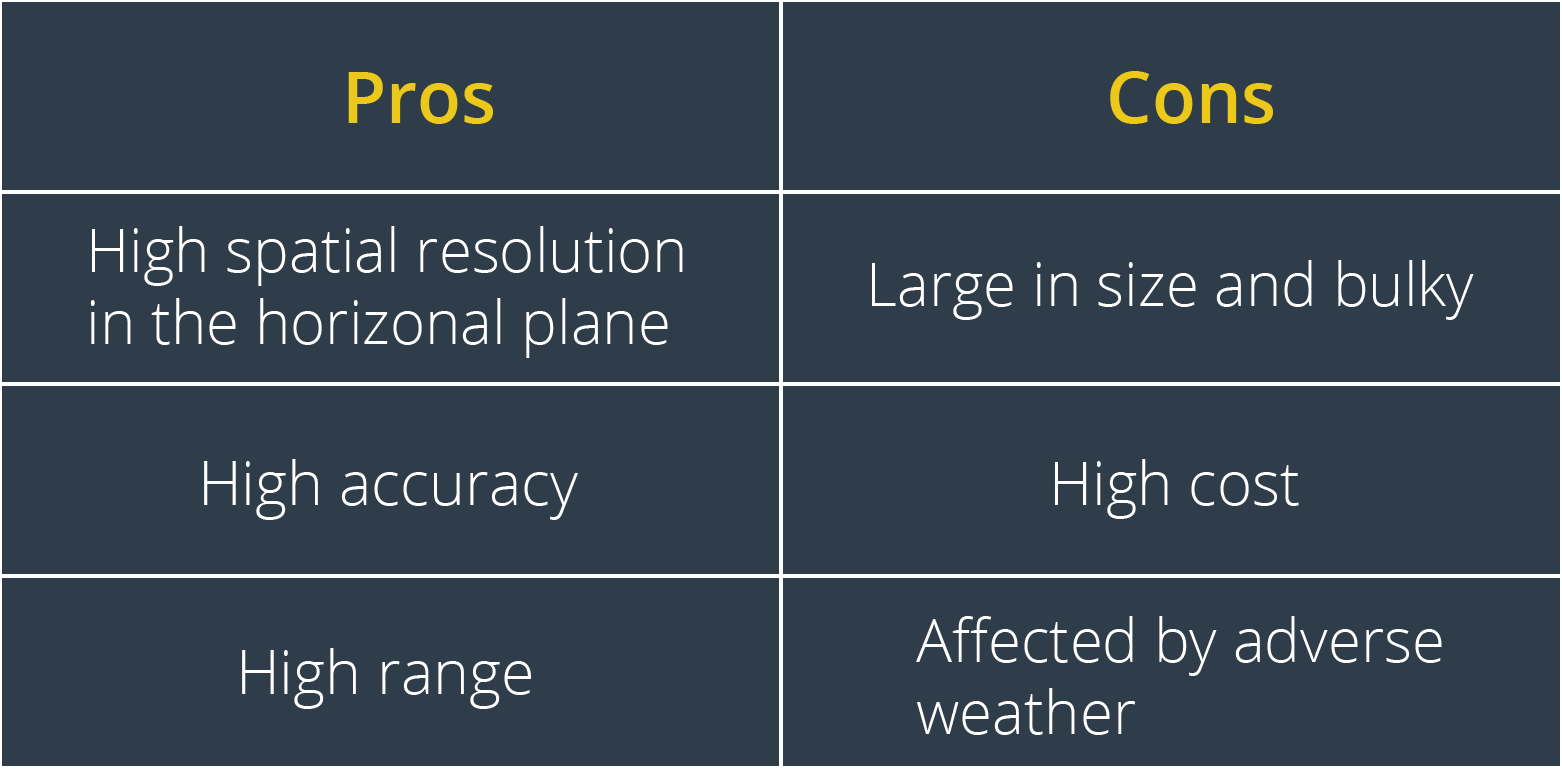
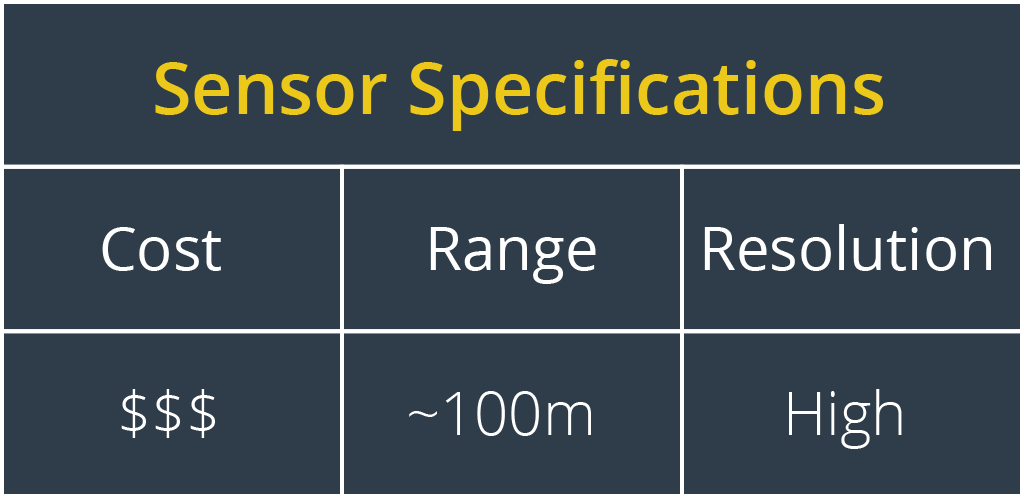
To better understand these two modalities, let us take a quick look at a few sensors. We will be exploring not only how each sensor functions, but also some of the pros and cons associated with each.
Active Sensors
Laser Range Finder (Lidar)
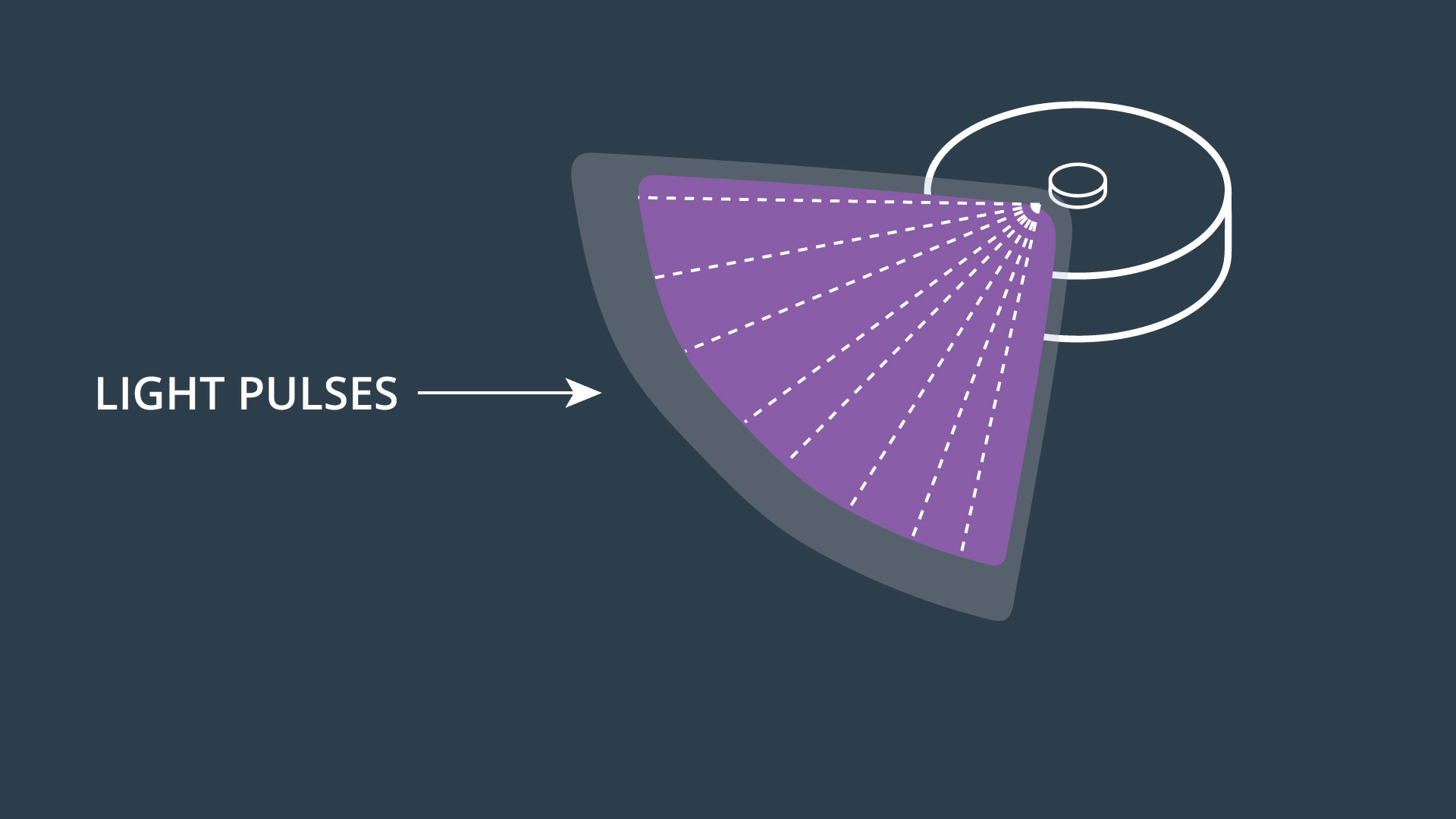
3D Laser Range Finders or 3D laser scanners are active sensors developed based on the Light Detection and Ranging (Lidar) method. Meaning, these sensors illuminate the target with a pulsed laser and measure the reflected pulses.
Since the laser frequency is a known stable quantity, the distance to objects in the field of view is calculated by measuring the time from when the pulse was sent to when it was received.
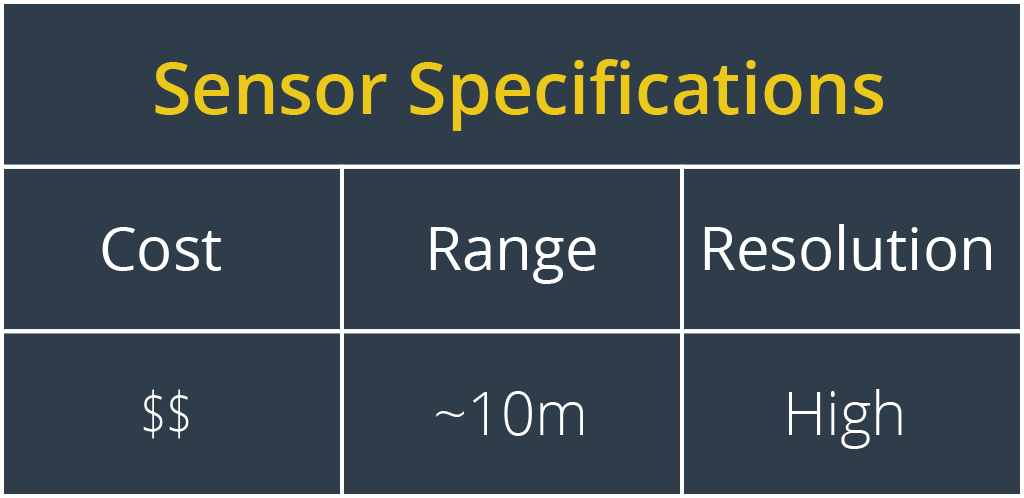
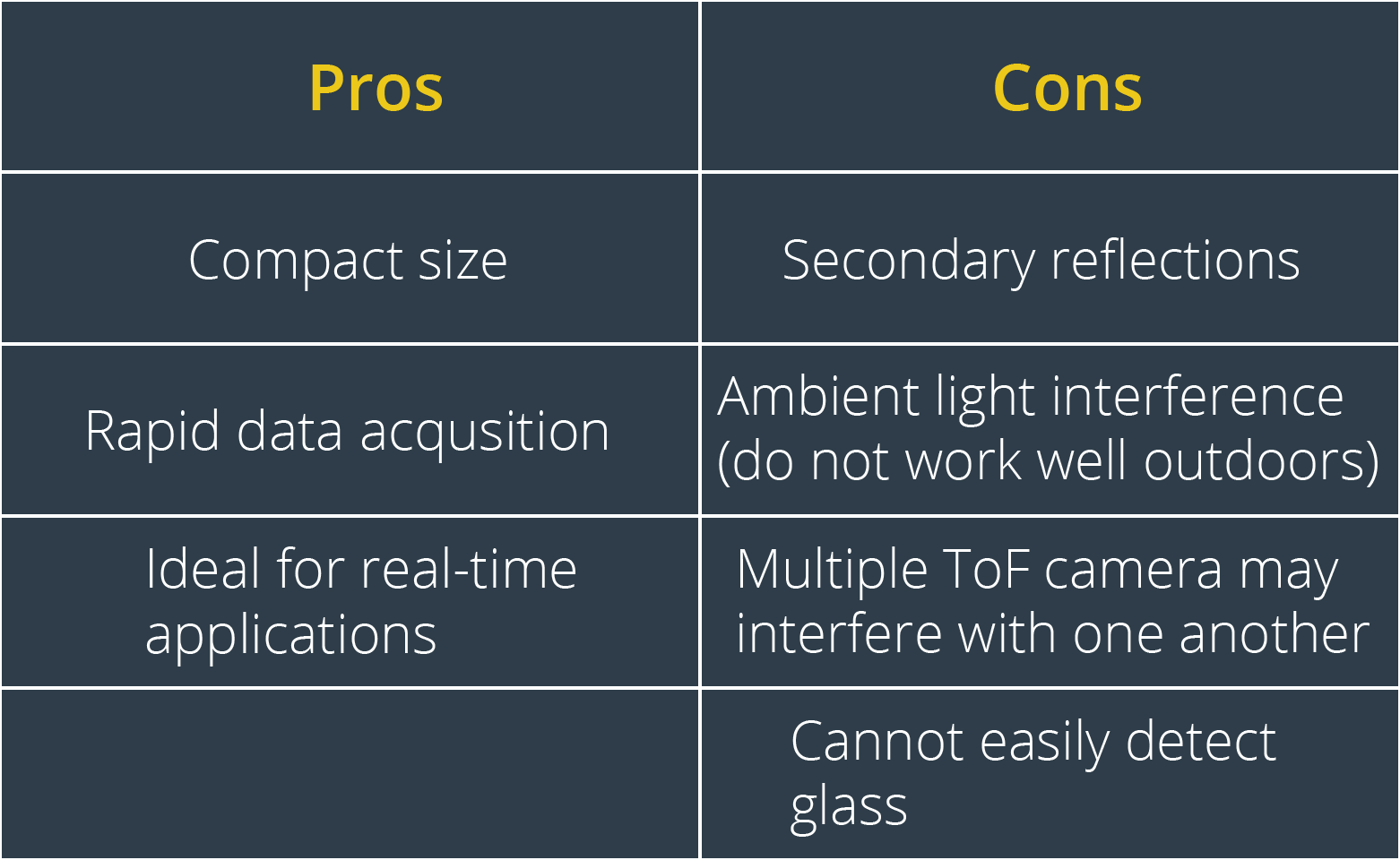
Time of Flight camera
A 3D time of flight camera is an active sensor that performs depth measurements by illuminating an area with an infrared light source and observing the time it takes to travel to the scene and back.
However, unlike a Laser Range Finder, a ToF camera captures entire Field of View with each light pulse without any moving parts. This allows for rapid data acquisition.
Based on their working principle, ToF sensors can be divided into two categories; pulse runtime and phase shift continuous wave (for a more detailed discussion check out this slide deck).
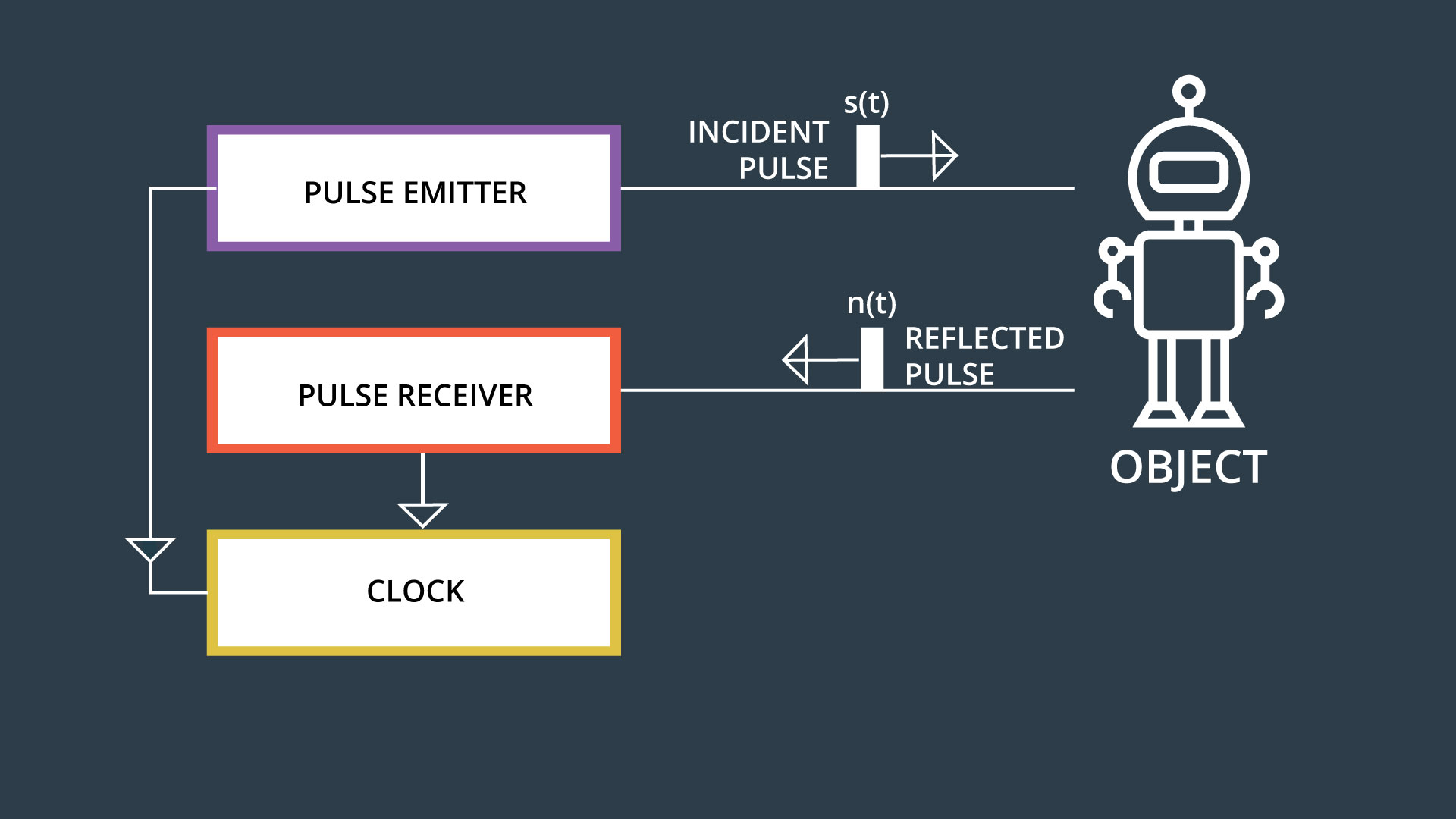
Pulse Runtime Sensor
A pulse runtime sensor sends out a pulse of light and starts a timer, then it waits until a reflection is detected and stops the timer, thus directly measuring the light’s time of flight.
Although intuitive and simple conceptually, this technique requires very accurate hardware for timing.
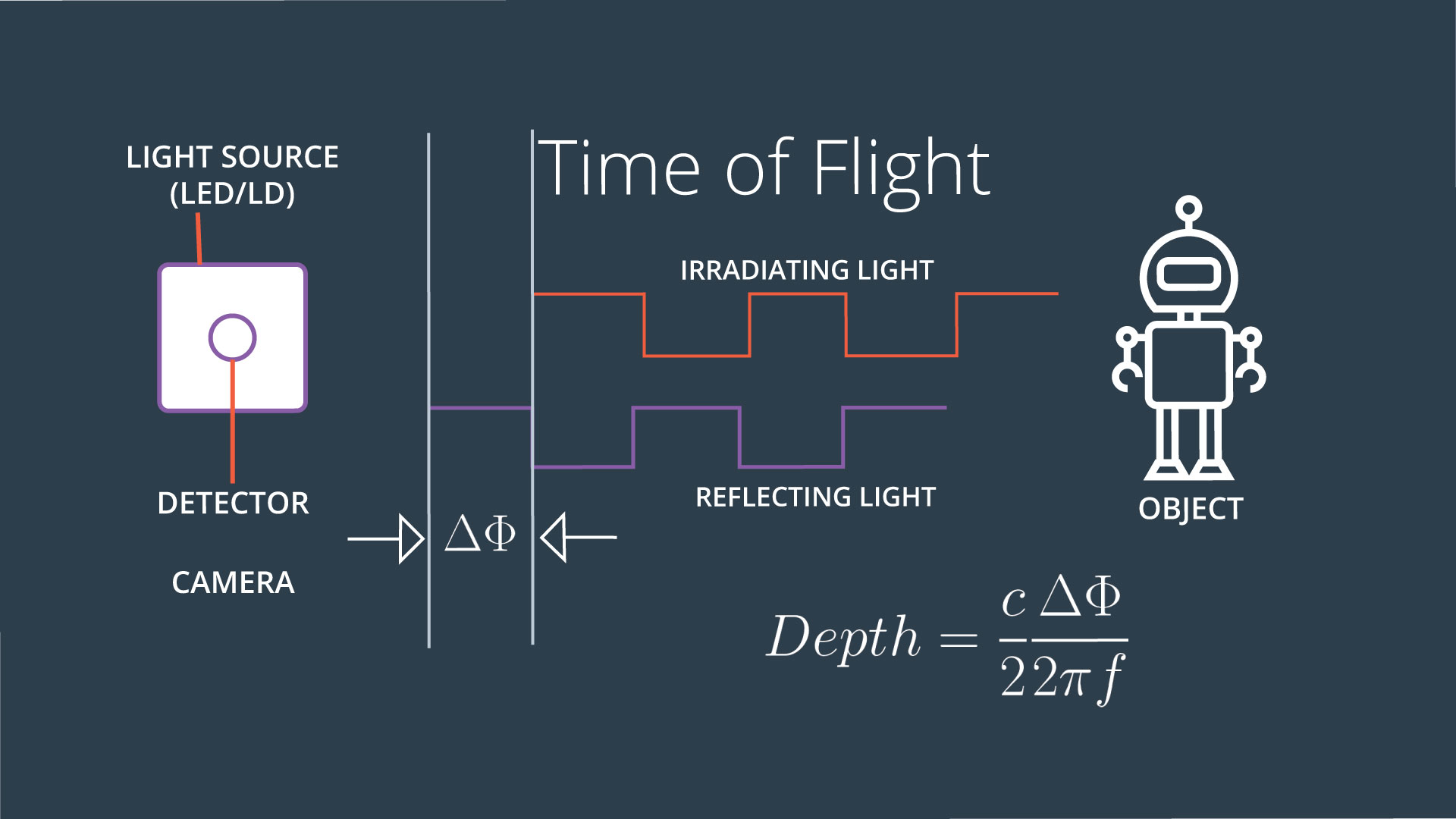
Phase Shift Continuous Wave Sensor
Unlike the Pulse runtime sensor, Phase Shift Continuous Wave sensor emits a continuous stream of modulated light waves. Here, the depth is calculated by measuring the phase shift of the reflected wave, creating a 3D depth map of the scene.
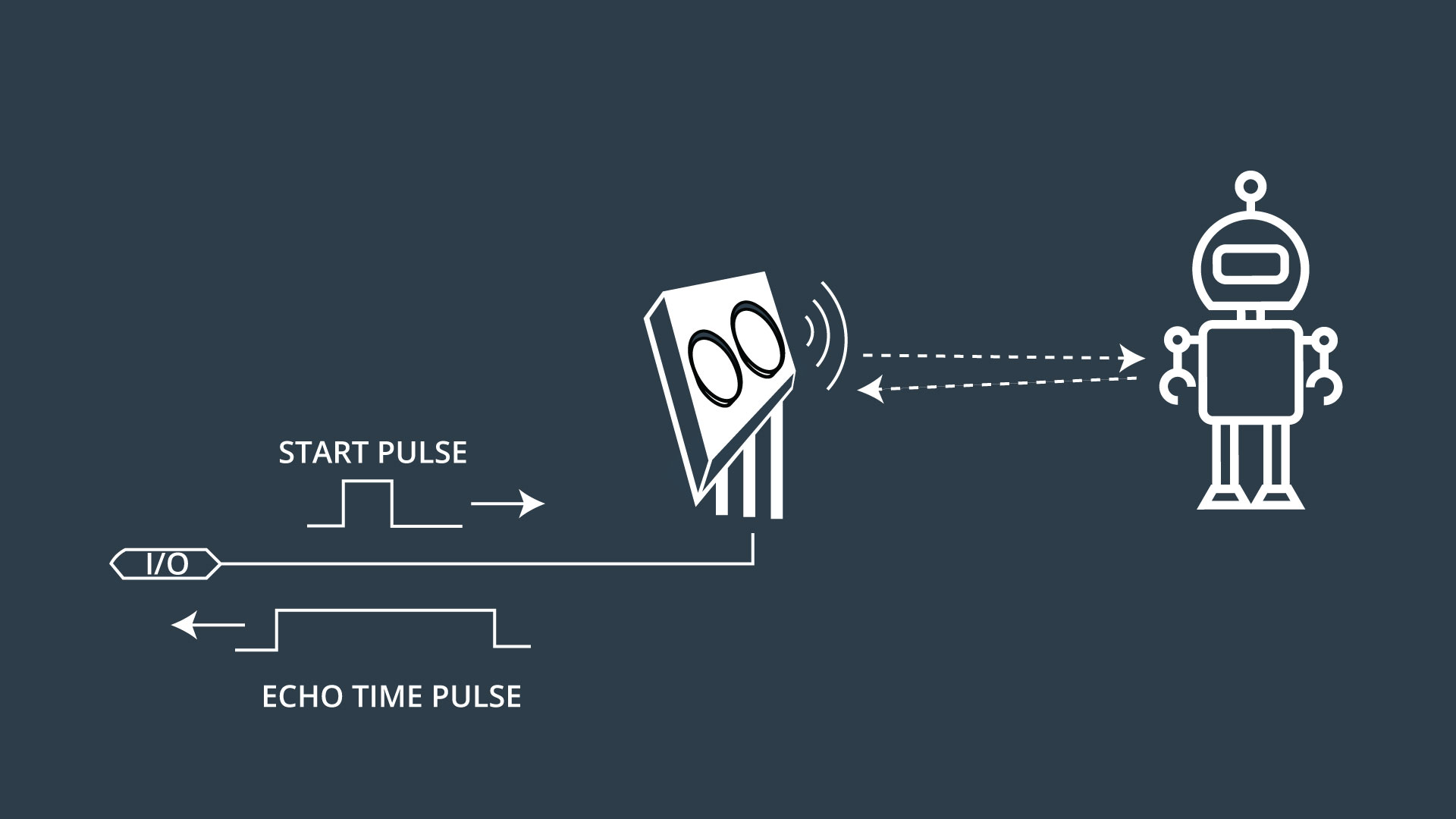
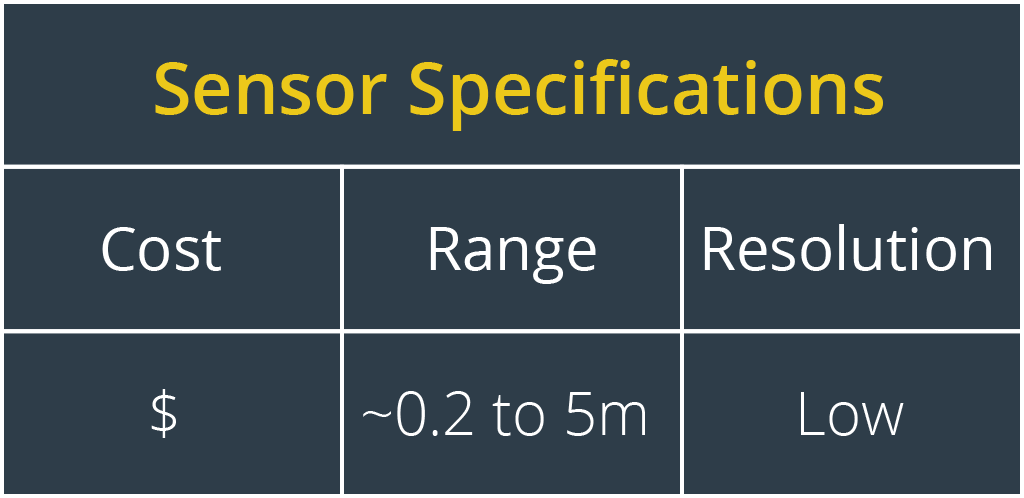
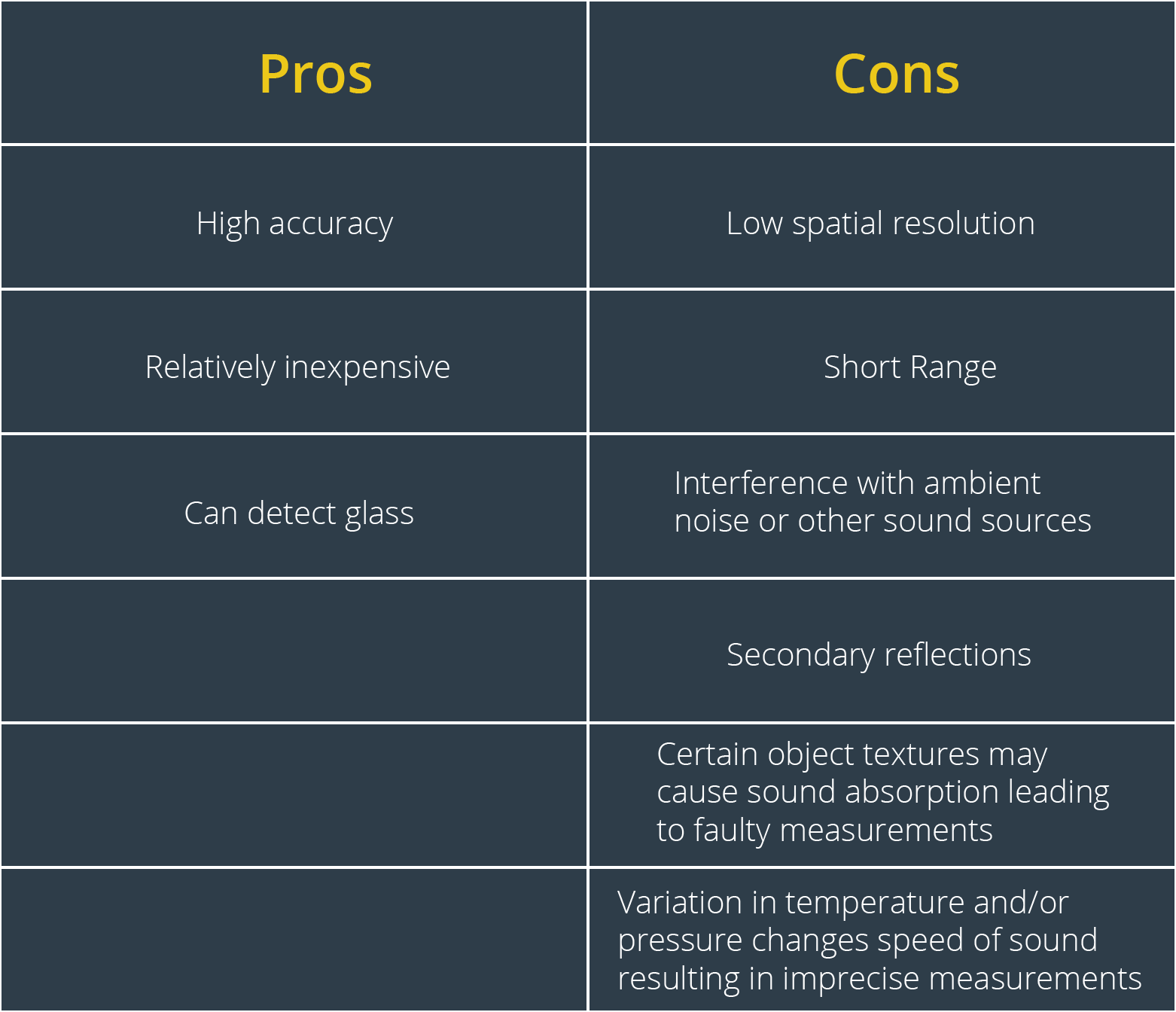
Ultrasonic sensor
Much like a Laser Scanner uses laser pulses for distance measurement, an ultrasonic sensor uses high frequency sound pulses.
The Ultrasonic Sensor sends out a high-frequency sound pulse and then measures the time it takes for the echo of the sound to reflect back.
The sensor typically consists of two piezoelectric crystals, one acts as a transmitter (like a speaker) and another as a receiver (like a microphone).
Since the speed of sound in air is known (about 343 meters per second), the ultrasonic sensor calculates the distance from a target by timing how long it takes for the reflected pulse to reach the receiver.